Enhancing the Linux kernel with BTF type information

TL;DR: There is work in progress to bring compact debug type information into the kernel, which will be leveraged by BPF to get it to the next level in terms of developer experience and capabilities. We developed an algorithm that compresses 124MB of DWARF type data into just 1.5MB of compact BTF type data, making it suitable to be included in the Linux kernel image by default.
Please check out an updated version of this post, containing new information on how BTF and BPF CO-RE unfolded since the BTF dedup original publication. If there will be other important updates in the future, only that version is going to be updated. This one is effectively archived.
BPF and type information
BPF is a technology that allows unprecedented ability to execute custom external code safely inside the Linux kernel in response to various events/hooks. This enables all kinds of applications, that are either impossible or expensive to achieve by other means (e.g., low-overhead profiling and tracing, rich introspection, fast custom packet processing, etc.).
While the BPF technology is already very capable and is constantly being developed further, the current developer experience with it is not exactly a walk in the park yet. One way to smooth out the developer experience with BPF is through better introspection and debuggability of BPF code. To allow that, BPF needs to know a bunch of metadata information about the BPF program. Type information is one of a few critical pieces of metadata necessary to bring the BPF experience to the next level. Eventually, this metadata will enable not just introspection, but also much higher levels of re-usability of BPF code across different versions of the Linux kernel (the so-called "compile once, run everywhere" approach).
How is such metadata represented in normal, non-BPF programs? It's typically done through DWARF debug information. The problem with DWARF though, is that it's very generic and expressive, which makes it a quite complicated and verbose format, and thus unsuitable to include in the Linux kernel image due to size overhead and the complexity of parsing it.
Enter BTF (BPF Type Format). It's a minimalistic, compact format, inspired by Sun's CTF (Compact C Type Format), which is used for representing kernel debug information since Solaris 9. BTF was created for similar purposes, with a focus on simplicity and compactness to allow its usage in the Linux kernel.
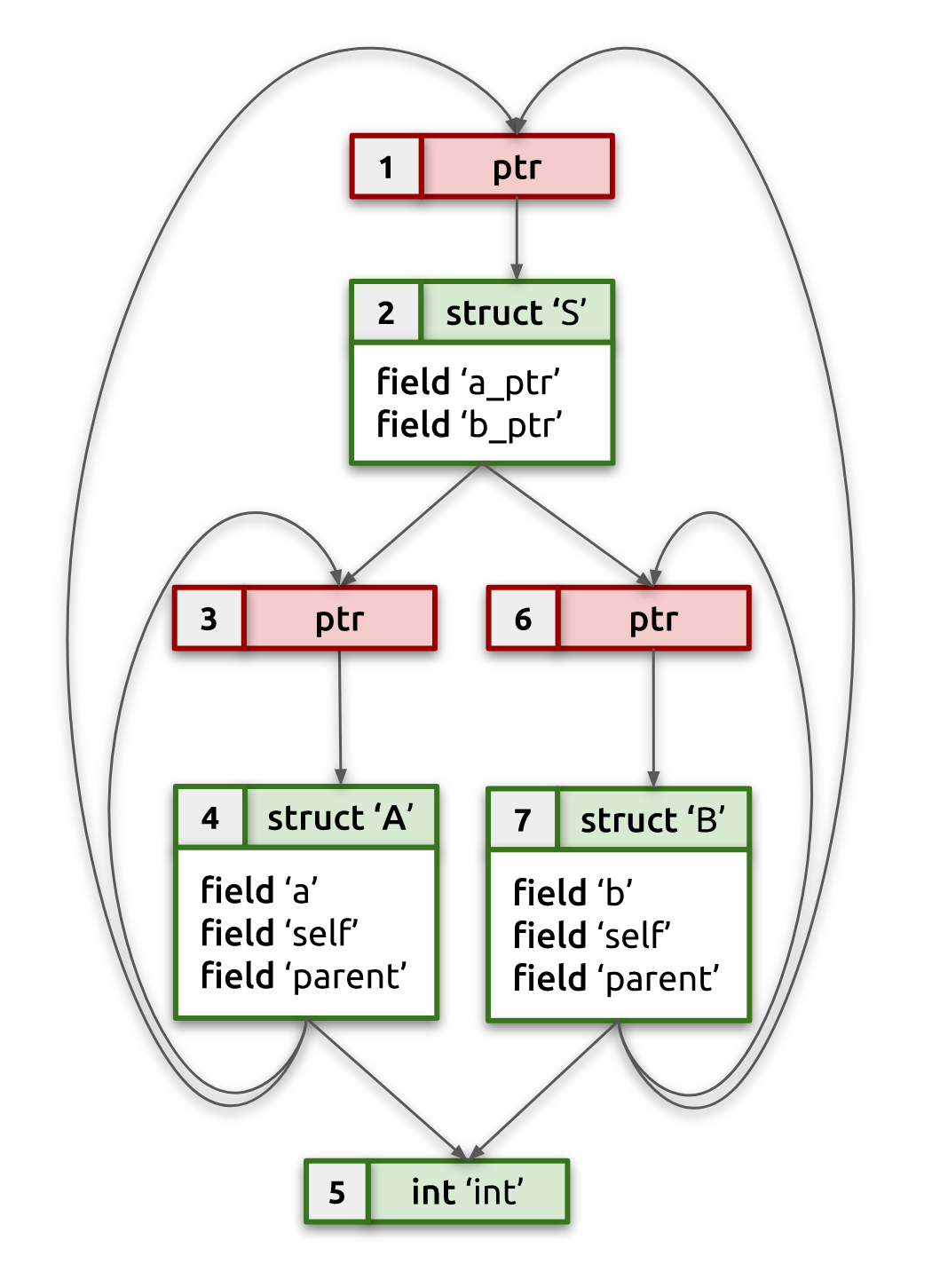
We won't describe BTF in a lot of detail here—see the links above to get complete information. Suffice it to say that BTF represents each type with one of a few possible type descriptors identified by kind: BTF_KIND_INT, BTF_KIND_ENUM, BTF_KIND_STRUCT, BTF_KIND_UNION, BTF_KIND_ARRAY, BTF_KIND_FWD, BTF_KIND_PTR, BTF_KIND_CONST, BTF_KIND_VOLATILE, BTF_KIND_RESTRICT, BTF_KIND_TYPEDEF—a few more might be added soon for functions support. Depending on the kind, there might be additional variable-sized information available. Some kinds of types can reference other types using their type IDs (e.g., int* type is two type descriptors: PTR → INT). The type descriptor's ID is its position in the input array of all descriptors. BTF type information is stored in .BTF ELF section, which contains two parts: BTF type descriptors, followed by \0-separated strings section.
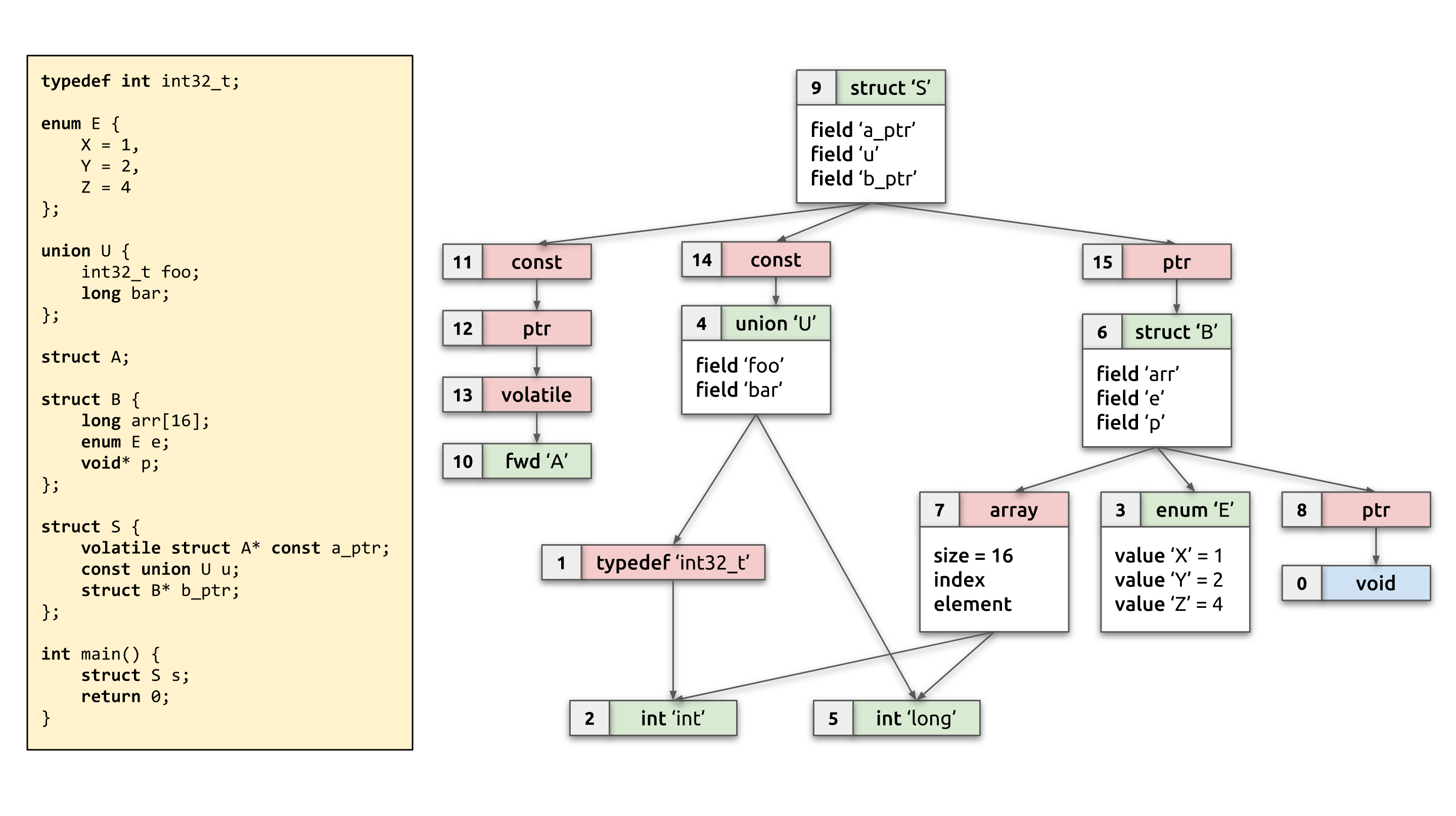
The diagram above should give a pretty good idea of the BTF type graph. It shows some C source code on the left and its corresponding BTF type graph on the right. The type with ID 0 is special, it represents void and is implicit: the first type descriptor in the .BTF section has type ID 1. In all the diagrams in this blog post, type IDs are written out in the top-left corner of each type node. Type references are marked with arrows. For structs/unions it should be obvious from the diagrams which field references which type. Note that type nodes are shown in two different colors: green for non-reference types, and red for reference once (this distinction will be explained further below).
A well-known (within the kernel community) tool, pahole, was recently updated with the ability to convert DWARF into corresponding BTF type information in a straightforward, one-to-one fashion. It iterates over each DWARF type descriptor, converts it trivially into a BTF type descriptor and embeds all of them into the .BTF section in the ELF binary. Simple and easy. We're done, right? Unfortunately, not yet.
DWARF information is emitted by the compiler for each compilation unit (CU) (e.g., in the C/C++ world that is a single compiled .c/.cpp file) independently and in isolation from other compilation units that form the resulting binary. This means that DWARF information within a single CU has to describe all types referenced directly and indirectly (e.g., through struct fields) by code within that CU, down to primitive types like int and long. DWARF data from all CUs is then concatenated by the linker and put into the resulting binary .debug_info (and a few other) ELF sections. As you can imagine, this results in a great duplication of type information. For instance, for the kernel image on my machine, DWARF type data (.debug_info section) takes 121.31MB and strings (.debug_str section) take another 2.68MB. After pahole's DWARF-to-BTF conversion there are 3.15 million BTF type descriptors: BTF type data takes 101.7MB, and strings take an additional 3.03MB.
There are still other problems though. The same type hierarchy (e.g., struct and all the types that struct references) can be represented in DWARF/BTF to various degrees of completeness (or rather, incompleteness) due to struct/union forward declarations.
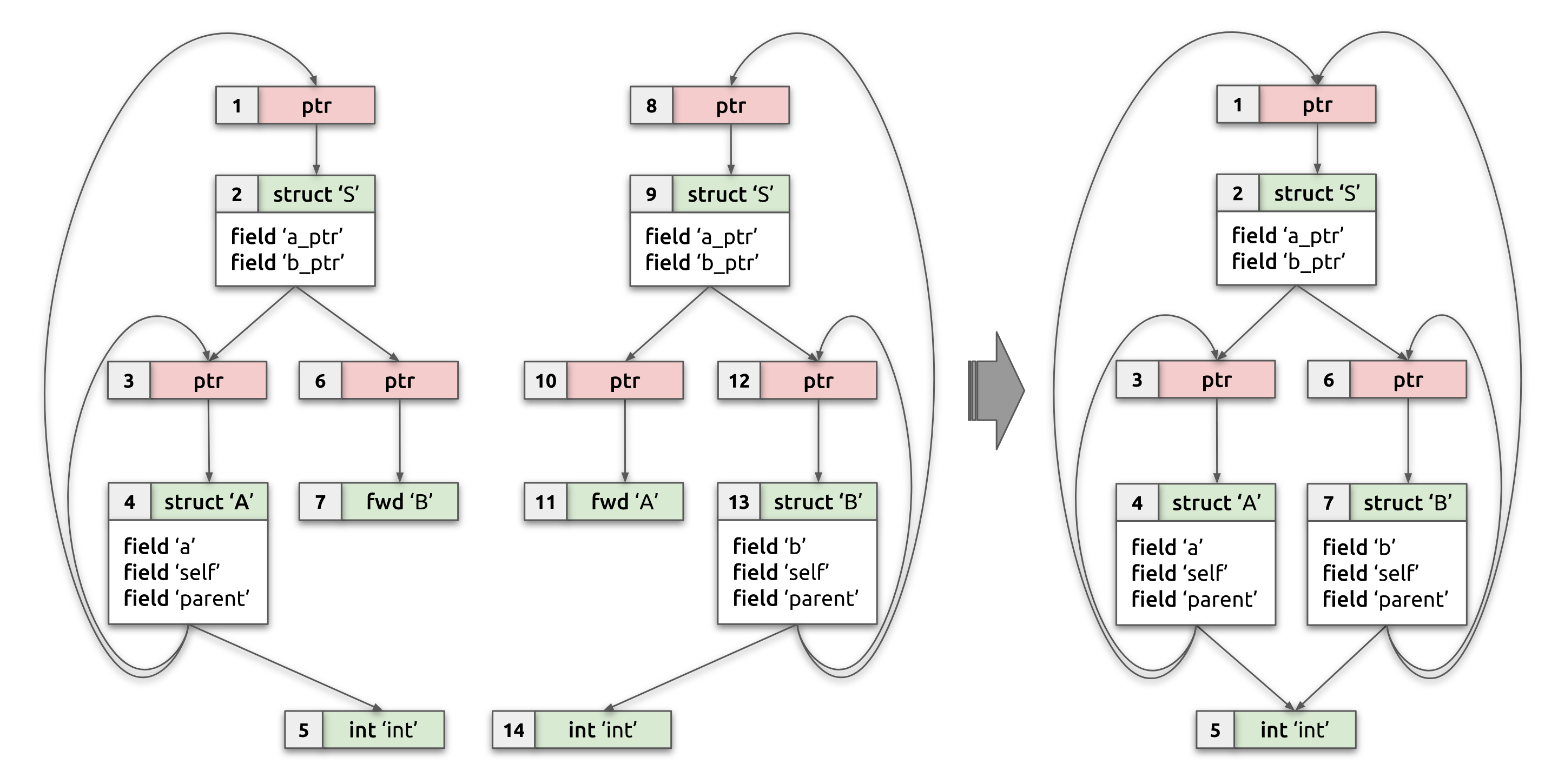
Let's take a look at an example, that we'll use throughout this note to better understand the problem and solution. Suppose we have two compilation units, each using same struct S, but each of them having incomplete type information about struct's fields:
// CU #1:
struct S;
struct A {
int a;
struct A* self;
struct S* parent;
};
struct B;
struct S {
struct A* a_ptr;
struct B* b_ptr;
};
// CU #2:
struct S;
struct A;
struct B {
int b;
struct B* self;
struct S* parent;
};
struct S {
struct A* a_ptr;
struct B* b_ptr;
};
In the case of CU #1, DWARF (and subsequently, BTF) data will know only that struct B (but no other) exists, but will know the complete type information about struct A. While for CU #2, it will know the full type information about struct B, but will only know about the forward declaration of struct A (in BTF terms, it will have BTF_KIND_FWD type descriptor with name B).
This compilation unit isolation means that it's possible there is no single CU with complete type information describing structs S, A, and B. Also, we might get tons of duplicated and redundant type information. Unfortunately, for BPF use cases that are going to rely on BTF data, it's important to have a single and complete type information per each unique type, without any duplicates and incompleteness.
That means we need to have an algorithm, that would take this duplicated and potentially incomplete BTF information and emit nicely deduplicated type information, while also "reconstructing" complete type information by merging pieces of it from different CUs. Such BTF data can then be embedded into the Linux kernel image and readily utilized by both the kernel itself (e.g., by BPF verifier for more advanced verification scenarios), as well as external tooling to allow types introspection and better debugging capabilities.
Additional complications we need to keep in mind come from the fact that types, in general, can form graphs containing cycles, not just DAGs. The example above has few type cycles, which we'll use as an opportunity to better demonstrate in subsequent sections how the algorithm works. Type cycles are very common in real programs: they're typical for linked list nodes, but any moderately complex program probably would form much more complicated cycles. The Linux kernel's struct task_struct is part of pretty big connected type graph with multiple cycles!
So, in summary, we need an algorithm that will:
- deduplicate redundant BTF information and leave single instance of each unique type;
- merge and reconstruct complete type information across multiple CUs;
- handle type cycles correctly and efficiently;
- do all of the above fast and reliably to become a part of Linux kernel build process.
This note describes one such BTF deduplication (or "dedup", for short) algorithm.
Algorithm
The BTF dedup algorithm takes as an input an in-memory blob representing .BTF ELF section with all BTF type descriptors and string data, that comes separately from descriptors. It overwrites that memory in-place with deduplicated types and strings without any loss of information.
While the algorithm does deduplication, it also merges and resolves type information, whenever possible. For instance, in the example above with two compilation units having partial type information for structs A and B, the output of the algorithm will emit a single copy of each BTF type that describes structs A, B, and S (as well as type information for int and pointers), as if they were defined in a single compilation unit (see the diagram below for a visual representation of input and expected output BTF type graphs):
struct A {
int a;
struct A* self;
struct S* parent;
};
struct B {
int b;
struct B* self;
struct S* parent;
};
struct S {
struct A* a_ptr;
struct B* b_ptr;
};
Algorithm summary
The algorithm completes its work in five separate passes, which we'll describe briefly here and in detail in subsequent sections:
- Strings deduplication: Deduplicate string data, re-write all string offsets in BTF type descriptors to simplify string comparisons later.
- Non-reference types deduplication: Establish equivalence between and deduplicate integer, enum, struct, union and forward types.
- Reference types deduplication: Deduplicate pointers, const/volatile/restrict modifiers, typedefs, and array.
- Type compaction: Compact type descriptors leaving only unique ones.
- Type IDs fix up: Update all referenced type IDs with new ones established during compaction.
There are also a few important ideas and data structures the algorithm relies on, which are critical to understanding it and would be useful to keep in mind as you follow along.
String deduplication as a very first step. BTF doesn't embed strings into type descriptors. Instead, all the strings are concatenated into a byte array of string data with
\0as a separator. Strings themselves are referenced from type descriptors using offsets into this array (typically throughname_offfields). By performing string deduplication early, we can avoid comparing string contents later: after string deduplication it's enough to just compare corresponding string offsets to determine string equality, which both saves time and simplifies code.Using a side array to store type equivalence mapping for duplicated and resolved BTF types, instead of modifying IDs in-place. As the algorithm performs deduplication and type info merging, it needs to transform the type graph to record type equivalence and resolve forward declarations to struct/union type descriptors. By utilizing a separate array to store this mapping (instead of updating referenced type IDs in-place inside each affected BTF type descriptor), we are performing graph transformations that would potentially need
O(N)type ID rewrites (if done in-place) with just a single value update in this array. This is a crucial idea to allow simple and efficientBTF_KIND_FWD→BTF_KIND_{STRUCT|UNION}remapping. The small price to pay for this is the need to consult this array for every type ID resolution when trying to get BTF type descriptor by type ID.Canonical types. The algorithm determines the canonical type descriptor ("one and only representative") for each unique type. This canonical type is the one that will go into the final deduplicated BTF type information. For struct/unions, it is also the type that the algorithm will merge additional type information into, as it discovers it from data in other CUs. To facilitate fast discovery of canonical types, we also maintain a canonical index, which maps the type descriptor's signature (i.e., kind, name, size, etc.) into a list of canonical types that match that signature. With sufficiently good choice of type signature function, we can limit the number of canonical types for each unique type signature to a very small number, allowing the discovery of canonical type for any duplicated type very quickly.
Pass #1: strings deduplication
This step is pretty self-explanatory. Take a string section that follows BTF type descriptors, do equivalent of $ sort | uniq, and re-map all name_off fields of type descriptors to point to corresponding deduplicated string.
To reiterate the key idea #1 above, the purpose of this step is twofold:
- Eliminate duplicate strings to save space taken by the strings section.
- Simplify and speed up string comparisons by reducing them to offset comparison. Instead of doing
strcmp()of two strings, we now just need to compare correspondingname_offvalues.
Note that it's also possible to leave only strings, that are actually referenced by BTF type descriptors. DWARF information is more generic than BTF, so there might be strings in the DWARF string section that are referenced from other kinds of DWARF data, which we don't care about. Currently pahole blindly copies the DWARF strings section 1:1 into the BTF string section without doing any kind of filtering. By leaving only strings referenced from actual BTF information, we can further save a little bit of space.
Pass #2: non-reference types deduplication
BTF types can be divided into two broad categories of types:
- Reference types. These are usually unnamed and their equivalence is determined solely by equivalence of the type they are referencing. For instance, two BTF
BTF_KIND_PTRs are equivalent if and only if the types they are referencing are equivalent. Same forBTF_KIND_CONST,BTF_KIND_VOLATILE,BTF_KIND_RESTRICTandBTF_KIND_TYPEDEF.BTF_KIND_ARRAYis also considered a reference type because in addition to dimensionality info, array's index and element types determine equivalence of two arrays. - Non-reference types. Primitive types (
BTF_KIND_INT) and enums (BTF_KIND_ENUM) are obvious cases of this, as their equivalence is determined purely by their structure (name, bit size, signedness, set of possible values, etc). Structs (BTF_KIND_STRUCT) and unions (BTF_KIND_UNION) are slightly less obvious ones, as they might reference other types (and even form type cycles, as mentioned before) and their equivalence is determined by equivalence of the entire connected type graph they form. Nevertheless, for the purposes of the BTF deduplication algorithm they are considered to be non-reference types and are processed in the same pass as primitive types and enums.
In pass #2 we go over all non-reference types and deduplicate them. Unlike string deduplication, though, no data is yet re-written or copied around. For each unique type we determine its canonical representative that all other equivalent types would logically be replaced with in the output. This is done by keeping track of the equivalence map from any type to its canonical type. Also, the algorithm consults and updates the canonical index (key idea #3) to keep track of potential canonical candidates for types with the same type signature.
For reference types, the equivalence map is not yet initialized and is ignored, but for non-reference types it will point to either itself (when the type is a canonical one) or an equivalent type. This mapping is used for equivalence checks, and in later phases will determine which types should be emitted into the final output set of BTF types: only the unique canonical type will be preserved.
To quickly determine a potential canonical type, the algorithm maintains a canonical index from the BTF type signature to a list of potential canonical types. The type signature incorporates key distinguishing factors of a type: name, kind, size, number and names of members (for enum, struct, and union). All those are hashed together and the resulting number is used as a lookup key into the canonical index. By choosing a good hashing function and a set of distinguishing factors, we are significantly reducing the number of potential candidates that need to be checked for complete equivalence, greatly speeding up processing time. Any type with a different type signature won't be even considered. The list of candidates will normally be either empty (if the type hasn't been seen before) or will contain one candidate, though due to hash collisions this can have a longer list of candidates.
Equivalence checks are performed differently according to the particular kind of BTF type.
Two integer types are equivalent if and only if their name, bit size and signedness matches. This way, 32-bit 'in' will be different from 32-bit 'unsigned int', for instance.
Two enum types are equivalent, if and only if their name, size and a set of values and value names match exactly.
Note that without loss of generality, and for the sake of brevity, I'll refer to structs only, but all the same logic applies to unions and functions. When functions are added to BTF, they can be treated as struct, where the name of a function corresponds to a struct name, arguments are fields, and return type is just a special field of a struct.
Determining equivalence of two structs is a bit more involved though. Of course, first and foremost, all the basic information (name, size, number and names of fields) should match, but that is not sufficient for two structs to be equivalent. It's necessary to check equivalence of entire type graphs that are formed by types referenced from struct's fields, including all the further indirectly referenced types.
This is done by traversing these graphs with a DFS algorithm, keeping track of a "hypothetical" equivalence mapping for types we've traversed so far. On one side we have canonical struct (and its corresponding type graph), on the other side, a candidate struct and type graph, that we're comparing against the canonical one. Hypothetical mapping keeps track of which type in candidate type graph is equivalent to in canonical type graph. This allows us to avoid cycles (by skipping equivalence checks for types we already compared) and detect conflicts (contradictions), if type graphs are not equivalent.
If two different types in a candidate type graph are mapped to the same canonical type, then we have a contradiction, and the type graphs cannot be equivalent. This must be true because all types in the candidate type graph come from a single CU, so there can be only one type for each unique type used in that CU, thus each candidate type must map to a different canonical type. The opposite doesn't have to hold for canonical type graph, as it can be "stitched together" from types coming from multiple CUs (due to type merging), so two different types in a canonical type graph can map to a single type in a candidate type graph.
This check proceeds as follows:
Start from two structs whose equivalence we're establishing. Check their basic info and field count/names for equality. If any of that doesn't match, then two structs are not equivalent.
For each candidate field and corresponding canonical field, check equivalence of those field's types:
- If they are already marked equivalent in global equivalence mapping, no further checks are required for those types. This can happen when two different structs have partial overlap of type graphs and we already did an equivalence check for another type graph.
- If the hypothetical mapping already contains canonical type ID, then verify the mapping is consistent. If it's mapped to exactly the same candidate type, skip further checks, since we already established equivalence previously. This could happen if the type graph contains cycles (e.g., a struct has a field with a pointer to itself). If canonical type is already mapped to another type, we've got a contradiction and thus the whole type graph is not equivalent.
- Otherwise, add hypothetical mapping from canonical to candidate type and proceed with the equivalence check:
- If either candidate or canonical types are of the
BTF_KIND_FWDkind and the other side is struct (union, function), assume they are equivalent. This is a quirk that is necessary to perform forward declaration resolution into concrete type, so that we can eventually reconstruct complete type information; - Otherwise, if kinds of candidate and canonical differ, then they are not equivalent;
- If they are both enums/integer types, check enum/integer type equivalence (as described above);
- If types are reference types, just assume they're equivalent and recursively check equivalence of types they're referencing;
- Struct equivalence is checked recursively following this algorithm from step 1.
- If either candidate or canonical types are of the
If at any step we find that type graphs are not equivalent, we proceed to check the next candidate, if there are more. If all canonical types were exhausted, then the struct must be unique, so we mark it as such in the global equivalence mapping (and populate the canonical index with the new entry).
But if we didn't detect any contradictions and checked all reachable types in type graph, then the type graphs must be equivalent. We're going to merge hypothetical mapping into global equivalence mapping to record all the determined type equivalences and avoid performing the same work again later.
When merging hypothetical mapping into equivalence mapping, we need to be careful to skip over hypothetical equivalences of reference types (it's too early to determine their equivalence yet, we'll need to wait until pass #3).
Also, we need to merge extra type information between candidate and canonical type graphs, by remapping BTF_KIND_FWD types into equivalent struct (union, function) types, if we determined any such equivalence. This FWD → STRUCT mapping can be both from canonical to candidate type, as well as candidate to canonical one. In both cases we need to adjust our equivalence mapping to establish this relationship.
Updating equivalence mapping from FWD type to STRUCT type will effectively update all the types in all CUs that reference equivalent FWD type to now point to concrete STRUCT type in one simple update operation. This is due to the fact that any other equivalent FWD type will resolve to canonical FWD type, which we now also point to its corresponding canonical STRUCT type, so by doing a two-hop jump through equivalence mapping, any equivalent FWD type will resolve into canonical STRUCT type!
Consider our working example from the introduction. After processing CU #1, we'll know full type information for struct A and struct S, but we'll only have BTF_KIND_FWD for struct B. Types in this type graph will be marked as canonical (except for pointers/consts). When processing CU #2 we'll establish that type graph for struct S from CU #2 (including full type information for struct B) is equivalent to (now) canonical type graph for struct S from CU #1. As part of that, we'll also establish that BTF_KIND_FWD of struct B in CU #1 is equivalent to full type information of struct B in CU #2. We now can use this relationship to complete canonical type graph from CU #1 with parts of type graph from CU#2 and arrive at complete merged type graph from both CU#1 and CU#2!
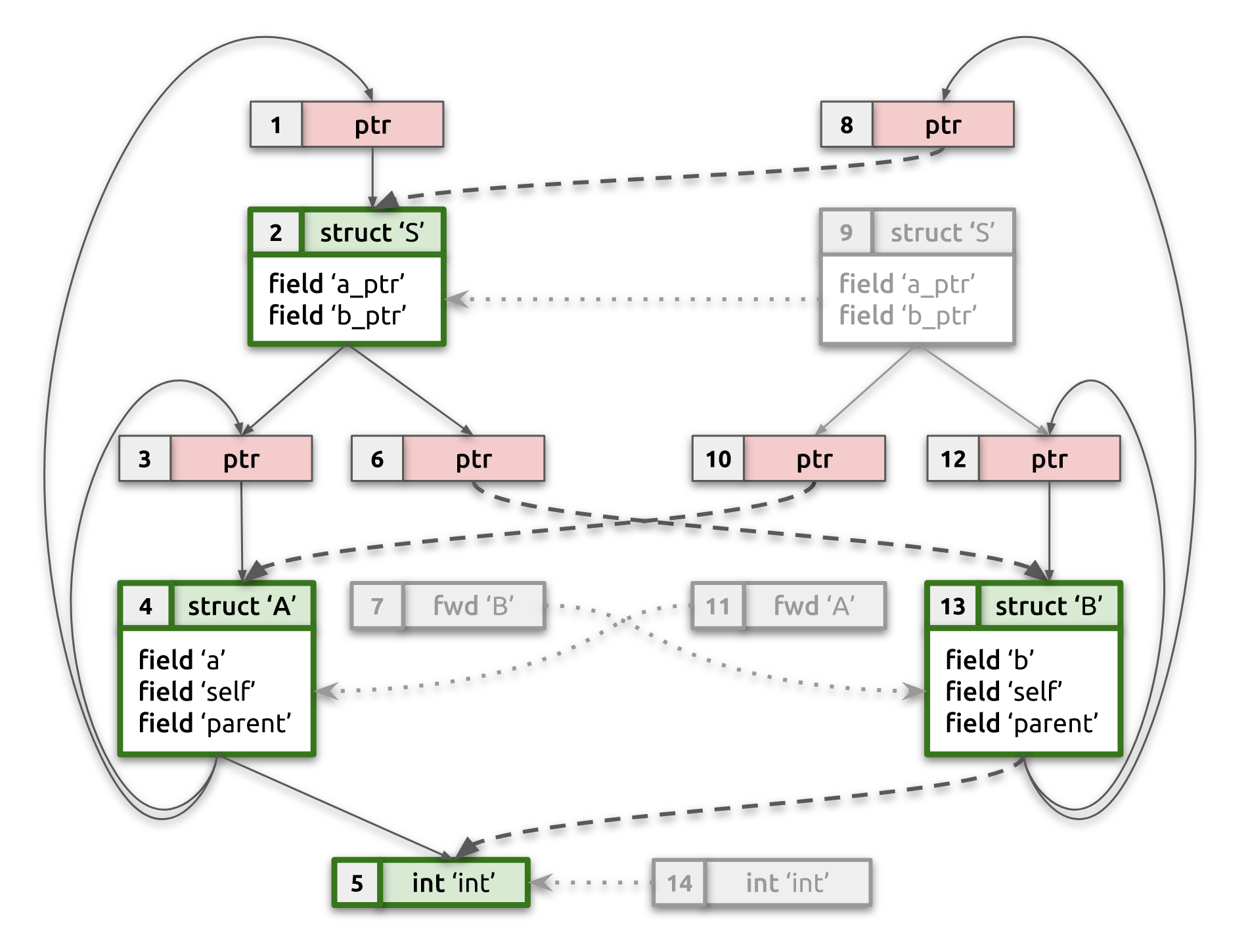
The picture below should help explain this. It shows state of example's type graph after pass #2. Duplicate non-reference types are grayed out; canonical non-reference types are bold green; dotted lines show equivalence mapping, while dashed lines indicate updated type references resulting from deduplication and type merging. Notice how pointers are not yet deduplicated, so we have two independent pointers to struct S, which will be fixed in the next pass:
struct A→[1] ptr→struct S;struct B→[8] ptr→struct S.
Pass #2 is the most intricate and crucial step of the overall algorithm. At the end of this pass each non-reference type will either be identified as canonical (unique) type or will be mapped into an equivalent canonical type.
Pass #3: reference type deduplication
Now we're finally ready to determine equivalence for all reference types as well. This pass relies on the same canonical index and equivalence mapping used and populated for non-reference types by the previous pass, except by now we have a crucial guarantee that's necessary for reference type deduplication: all non-reference types are mapped to canonical ones, and that mapping won't change. This fact makes it trivial to deduplicate reference types.
For each reference type:
- Determine the canonical type of referenced type recursively. We either already know it for non-reference type or can determine it by following this algorithm recursively for the referenced reference type first. It's necessary to determine the canonical type of referenced type first, because canonical type ID of referenced type is included into type signature for reference types (e.g.,
PTR's type signature is canonical type ID of type to which pointer is pointing). - Once we have canonical referenced type, iterate over potential canonical types of current reference type using canonical index:
- Check if both candidate and canonical types have same kind and other basic information. E.g., for
TYPEDEF,PTR,CONST,VOLATILE, andRESTRICT, we need to compare only kind. ForARRAYwe additionally need to compare dimensionality. If any of that mismatches, candidate and canonical types cannot be equivalent. - If canonical types of referenced types are the same, we've found equivalence, so mark them as such through updating equivalence mapping, otherwise, try the next candidate.
- Check if both candidate and canonical types have same kind and other basic information. E.g., for
- If no candidate is equivalent or there were no suitable candidates, then mark the current reference type as canonical in equivalence mapping (and add it into canonical index, of course).
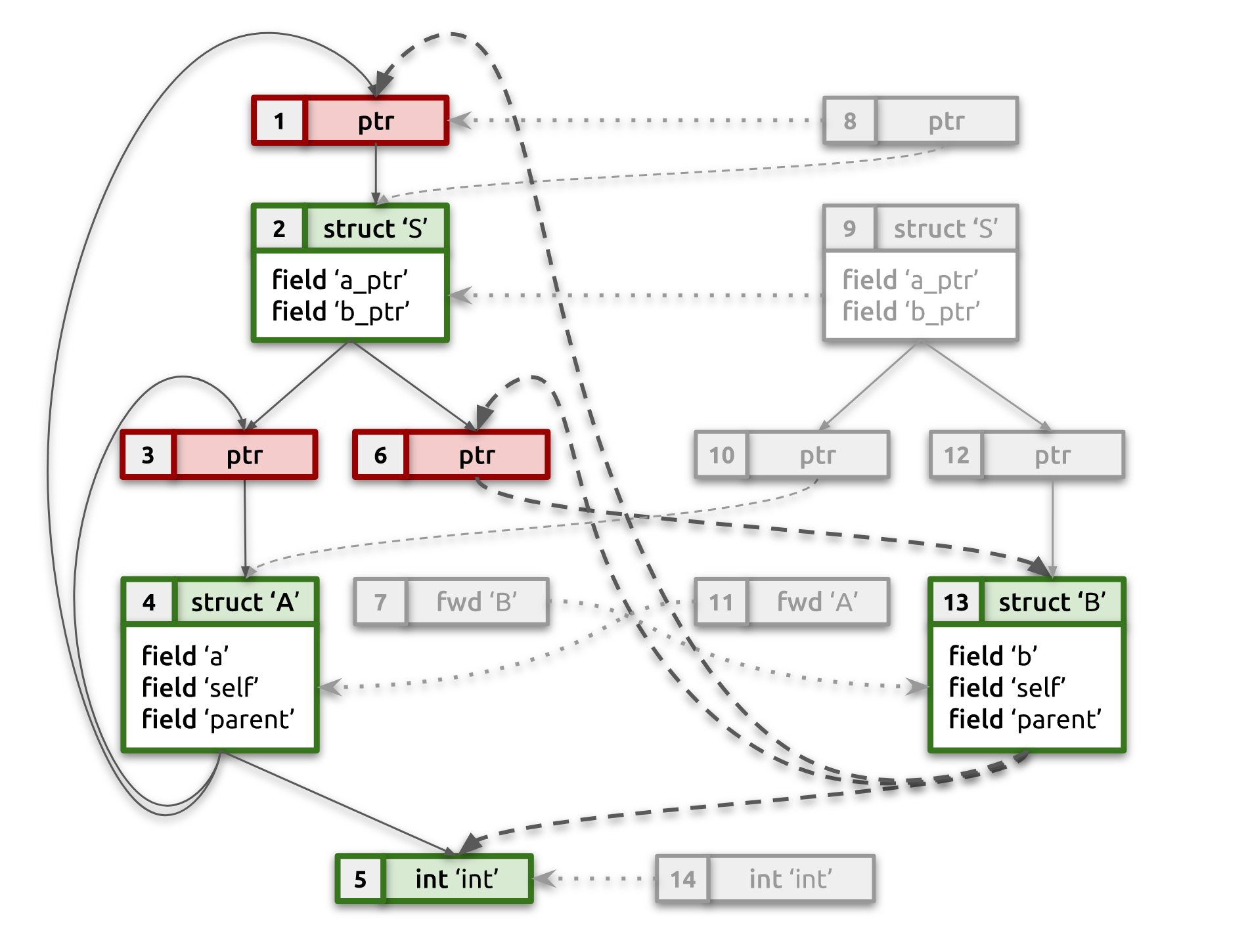
After completing this pass, our example type graph will look like the one below. Notice how struct B fields are now referencing canonical pointers [1] and [6], which in their turn are referencing struct S and struct B, respectively.
Pass #4: types compaction
At this point, we know the canonical type for each input type, so it's finally time to get rid of duplicates. We're also going to re-purpose the equivalence mapping array now. As we compact types, we'll be updating corresponding entries in the equivalence mapping to point to a new compacted type ID in the output data.
We iterate the equivalence map from type #1 (type #0 is always void and is implicit) through type #N, skipping non-canonical types (those that are mapped into some other type). For each canonical type:
memmov()its type information into the beginning of the output data block; this is safe to do as it is filled with either duplicate type descriptors, which we don't care about anymore, or in worst case will contain the exact same type descriptor we're trying tomemmov(), which will make it a no-op.- Update corresponding entry in equivalence mapping to contain a new type ID (which is equal to number of compacted types so far).
Pass #5: type IDs fix up
At this point the input BTF type descriptors are overwritten with deduplicated BTF types (and potentially enhanced with additional "reconstructed" type information). The only problem is that reference types are still referencing other types using their old type IDs, as they were in the input data. Those type IDs are no longer valid and we should remap them into new compacted IDs.
This is why we kept track of old-to-new type ID mapping in the previous pass. Now we iterate all compacted types, and if any type references other type(s), we'll rewrite the corresponding type IDs using re-purposed equivalence mapping. Voilà!
Now we only need to memmov() string data to go right after BTF type descriptors and clean up after ourselves by freeing supporting data structures.
At this point input data now contains a smaller, deduplicated set of unique BTF types and a deduplicated array of strings right after it. Forward declarations should also be resolved into specific STRUCT/UNION types, if duplicated BTF data contained enough information to infer this.
Results
I ran the described algorithm against version 4.11 of Linux, built with DWARF debug information. Performance numbers are preliminary, but on my machine it took 2.6s to read and deduplicate Linux BTF information.
Numbers before deduplication:
| Type | Size | Reduction |
|---|---|---|
| DWARF type descriptors | 121.31MB | 1x |
| DWARF strings section | 2.68MB | 1x |
| BTF type descriptors | 101.7MB | 0.84x |
| BTF string data | 3.03MB | 1.13x |
| Number of BTF descriptors | 3,148,394 |
And after deduplication:
| Type | Size | Reduction |
|---|---|---|
| BTF type descriptors | 0.97MB | 104x |
| BTF string data | 0.63MB | 4.8x |
| Number of BTF descriptors | 22,898 | 137x |
To measure the impact of merging types, I ran the deduplication algorithm with no type merging and no special handling of BTF_KIND_FWD.
| Type | Size | Reduction |
|---|---|---|
| BTF type descriptors | 12.71MB | 9.5x |
| Number of BTF descriptors | 137,083 | 23x |
This shows that doing type reconstruction/merging is critical to achieving compactness (in addition to removing duplicate partial types).
What's next?
The next step for this project is to do some more testing/verification and integrate it into libbpf to make it available for (and used by) tools like pahole and BPF verifier itself. Once that's done, the path should be clear to have BTF information as a standard part of Linux kernels to enable new and exciting features of BPF.
Huge thanks to Alexei Starovoitov for introducing me to this nice and practical algorithmic problem and letting me bounce ideas off him. Also thanks to Yonghong Song for helping me to get started with this problem quickly and painlessly.